梯度下降算法变种及各类优化使用
最近看了一些有关梯度下降的内容,在这里做一下总结,包括梯度下降的变种,学习速率的设定等等,着急的可以拉到最下看结论。
基础梯度下降变种
全批量梯度下降 Batch GD
将全量训练集的样本都计算梯度后再更新,对于有$n$ 个样本的训练集,$\lambda$为学习速率,每次更新参数时如下:
这种方法太过耗时了,而且无法应用在在线算法上,所以一般只有数据量较小时才采用。
随机梯度下降 SGD
和上面的算法相反,SGD是在每计算出一个样本的梯度时就更新参数:
相比较之下,这种算法就可以快很多,但是因为每个样本都会导致参数的立刻更新,当遇到极端样本时,很容易把参数带“跑偏”,表现在损失函数上就是损失函数下降地不稳定,但是往往经过足够多次更新后,算法表现都会稳定下来,当然为了减轻这种不稳定性,使用SGD往往需要将学习速率慢慢降低。
小批量梯度下降 mini-batch GD
这种算法介于BGD和SGD之间,也就是每次通过一个mini-batch的数据来更新参数,一个mini-batch包含$m\in(0,n)$个样本,这个$m$往往会取一个定值(一般在$10^2-10^3$之间),那么相应的,参数的更新就是。
根据Hinton的说法,mini-batch比SGD更优秀,特别是在训练集数据可能有很多重复的时候。取mini-btach size的时候推荐取2的幂,比如128或者256,利于运算优化。
梯度下降算法优化方法
梯度调整相关
Momentum 动量法
当遇到鞍点时,SGD可能浪费很多时间在鞍的两侧徘徊,为了加快速度,可以使用Momentum算法。算法本质就是计算本次梯度时加上一部分上次的梯度,即:
$\gamma$通常设置为0.9或者其他小于1的值,这种方法使得参数在“确认的方向”上前进的更快,而在“犹豫的方向”上减慢下降速度,通常在确认问题有唯一全局最优时非常有效。
Nesterov 加速梯度
但是在Momentum方法中,一个球在按梯度往下滚的时候仅仅是盲目地随着势头,显然这是不够的。Nesterov加速梯度(NAG-Nesterov accelerated gradient)能够给我们的球一点点智能。在使用动量法时,我们知道我们的参数$w$会有一个动量项的变动$\gamma g^k$,那么我们在求偏导的时候就预先将这个变动加上,也就是我们算的不是当前位置的偏导,而是“可预测的未来”的偏导,也就是说我们先按照动量法里上次的梯度走一大步$\gamma g^k$,然后在计算如下的梯度:
也就是不管怎么说,先走一段,然后再打开谷歌地图看下北仑怎么走,It’s better to correct a mistake after you have made it.。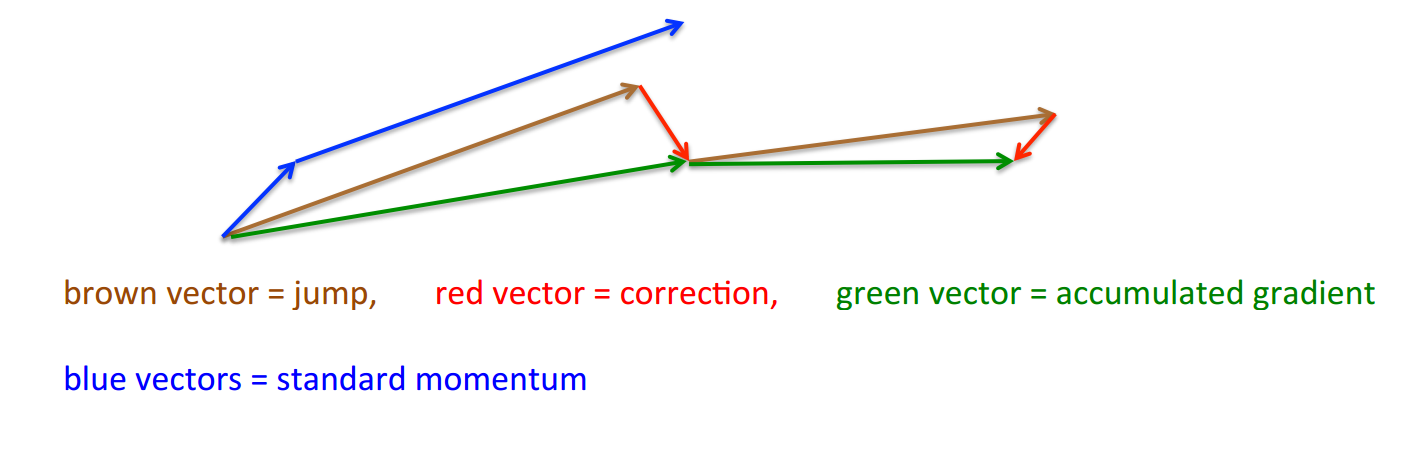 Nesterov
Nesterov
如图所示,蓝色的路线就是Momentum的路径,而Nesterov则是先走一步(棕色路线)再回正(红色路线)。
学习速率相关
下面几种方法都和学习速率相关
Adagrad法
这是一种对不同参数有着不同学习率的算法,基于对那些频繁更新的参数,调低它们的学习速率,对不频繁更新的参数则将其调大的朴素思想,因此对稀疏数据较为适用。谷歌那帮人发现这可以大大提高SGD的鲁棒性。
我们先来考虑单个参数$w_i$在第$t$ 步的情况,$G_{t,i}=\nabla_w l(w_i)$ , 那么按照一般梯度下降$w_{t+1,i}=w_{t,i}-\lambda g_{t,i}$,但是Adagrad这里将学习速率调整为:
这里的 $G_t \in\mathbb{R}^{d\times d}$ 是一个对角矩阵,其对角线上$i,i$ 表示参数$w_i$ 到$t$时的梯度的平方和,$\epsilon$是平滑项,通常设为1e-8。那么向量化后就是:
这里$\odot$是元素逐个相乘。
Adagrad的好处在于我们不用手动调学习速率了,其缺点在于我们总是在学习率的分母上累计平方和,因此学习率会越来越小,过分小之后会导致梯度消失等问题(不恰当的初始化参数也会导致这个问题)。下面的Adadelta就旨在修复这一问题。
Adadelta
Adadelta是Adagrad的一种改进(从名字上也能猜出来),首先在累计梯度平方和的时候,该算法不会将从头开始的梯度一直累加,而是使用衰减平均累加,我们用$E[g^2] $来表示,那么$E[g^2]_t=\gamma E[g^2]_{t-1}+(1-\gamma)g_t^2 $
这里$\gamma$就像是动量法里面那样,也是一个小于1的数值(约0.9)。那么我们就有
分母就是方均根(root mean square RMS),所以$\sqrt{E[g^2]_t+\epsilon}$ 也可以简写为 $RMS[g]_t$。
更进一步的,Adadelta的作者发现,更新公式中没有直接对应参数更新的单位,然后由Hessian方法推导出一阶近似Hessian方法(分母上加了参数的)。具体推导可以看原文。最终就得到了Adadelta的终极版本:
这里$RMS[\Delta w]_t=\sqrt{\gamma E[\Delta w^2]_{t-1}+(1-\gamma)\Delta w^2_t}$,而$\Delta w_t= -\frac{RMS[\Delta w]_{t-1}}{RMS[g]_t}g_t$ 。其实也就是这里分子上用一个和参数有关的猜测单元(hypothetical units)来替代了固定值学习率(初始化的时候$E[g^2]_0=0$,$E[\Delta x^2]_0$=0)。也就是说我们彻底消灭了一个超参数——学习速率。
但是该算法也是有缺陷的,其最大缺陷就在于在训练后期无法脱离局部最小值吸引盆(这时候可以考虑加上动量法)。
RMSprop
这个算法其实本质上和Adadelta差不多,是Hinton独立于Adadelta发现的,其更新策略就等同于上述Adadelta的中间版本。
这里$\lambda$可以默认为0.001。
Adam
Adaptive Moment Estimation(Adam)是另一种为每个参数计算不同学习速率的方法,即存储了梯度平方的指数衰减平均(和Adagrad一样),也存储了梯度本身的指数衰减平均:$m_t = \beta_1 m_{t-1} + (1 - \beta_1) g_t$ ,$v_t = \beta_2 v_{t-1} + (1 - \beta_2) g_t^2$ ($m,t$都初始化为0),但是作者发现他们都容易偏移到0,特别是衰减速率较小的情况下($\beta$很接近1)。
为此,他们提出要修正这种偏移:
$\hat{m}_t = \frac{m_t}{1 - \beta^t_1} $,
$\hat{v}_t = \frac{v_t}{1 - \beta^t_2} $
最终的更新策略就是
其他方法
重排 和 Curriculum Learning(课程学习)
简单来说就是每次迭代后对训练集样本进行重排,防止每次迭代式batch都一样。
而课程学习是有深度学习大牛Bengio在09年的ICML上提出,后来Koller在10年的NIPS上进一步模型化,简单说就是将学习目标进行由易到难的排列,协助算法跳出局部最优。
在这里的应用就是将训练集样本也进行由易到难的排列(比如人脸识别中,先喂人脸没有遮掩的样本,然后再喂比如带口罩/面纱/眼镜的样本)。
提前停止
在训练过程中监视误差变化,在改进停滞后停止训练。
加入梯度噪声
就是指在梯度更新中加入一个噪声值,一般是一个服从高斯分布的随机值,往往加入噪声项之后利于模型跳出局部极小。
小结
| 方法 | 思想 | 优点 | 局限 |
|---|---|---|---|
| 动量法 | 加速下降(梯度不是下降的原因而是改变下降状态的原因,类比于力学) | 加快训练速度,在只有唯一全局最优时很好用 | 太过于盲目,往往加速过头 |
| Nesterov加速度 | 在动量法基础上先走一段再回正 | 相较动量法更加“智能” | 回正有时适得其反 |
| Adagrad | 区别对待频繁更新的参数和很少更新的参数 | 在稀疏数据上表现好,增强鲁棒性,不用手动调学习率 | 可能导致学习率过小而致的梯度消失 |
| Adadelta | 改进adagrad,二阶方法的一阶近似 | Adagrad的优点且克服缺点再加上完全摆脱了超参数学习速率 | 训练后期难以脱离局部最小值吸引盆 |
| RMSprop | 根据参数分量最近的平均梯度量级改变学习率 | 和Adadelta类似 | 实际效果上略逊完全版的Adadelta |
| Adam | 使用梯度的一阶和二阶指数衰减平均 | 收敛速度快,不易陷入局部最小 | 需要鲁棒的初始化 |
总的来说,Adam和Adadelta应该是最好用的两类优化,值得首选,并在此基础上加入其他算法试试。
总的来说我们分两种情况来看,首先是小数据集(10,000)或者是大量的无重复数据集:
 wechat
wechat alipay
alipay